Agenda!
Among the deep learning methods, Long Short Term Memory (LSTM) networks are especially appealing to the predictive maintenance domain due to the fact that they are very good at learning from sequences. In this article, we try to build an LSTM network in order to predict the remaining useful life of aircraft engines. The network uses simulated aircraft sensor values to predict when an aircraft engine will fail in the future so that maintenance can be planned in advance.
The first line of code!
Data Summary
In the Dataset directory, there are the training, test, and ground truth datasets. The training data consists of multiple multivariate time series with “cycle” as the time unit, together with 21 sensor readings for each cycle.
Each time series can be assumed as being generated from a different engine of the same type. The testing data has the same data schema as the training data. The only difference is that the data does not indicate when the failure occurs. Finally, the ground truth data provides the number of remaining working cycles for the engines in the testing data.
>Training Dataset
>Test Dataset
>Ground Truth Dataset
Data Preprocessing
In the data preprocessing part, we generate for the training data which are Remaining Useful Life (RUL), label1, and label2. Also“label1” is basically used for binary classification.
For creating the test data, we will first normalize the parameters from the MinMax normalization applied to the training data.
Next, we use the ground truth dataset to generate labels for the test data.
Modeling
LSTM layers expect input in the shape of a NumPy array of 3 dimensions (samples, time steps, features) where samples are the number of training sequences, time steps is the lookback window, or sequence length and features is the number of features of each sequence at each time step.
The next obvious step is to write a function to generate labels!
Creating LSTM Network
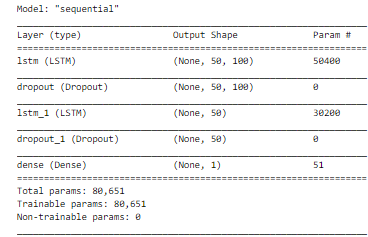
This is the time we build a deep network. The first layer is an LSTM layer with 100 units followed by another LSTM layer with 50 units. Dropout is also applied after each LSTM layer to control overfitting. The final layer is a Dense output layer with a single unit and sigmoid activation since this is a binary classification problem.
The model somewhat looks like :
Training the model
At this stage, we would train the Neural network for 100 Epochs with early stopping, monitoring the validation loss with the patience of 10.
The loss function specially used in this model is ‘binary_crossentropy’ along with an ‘Adam optimizer’ with it.
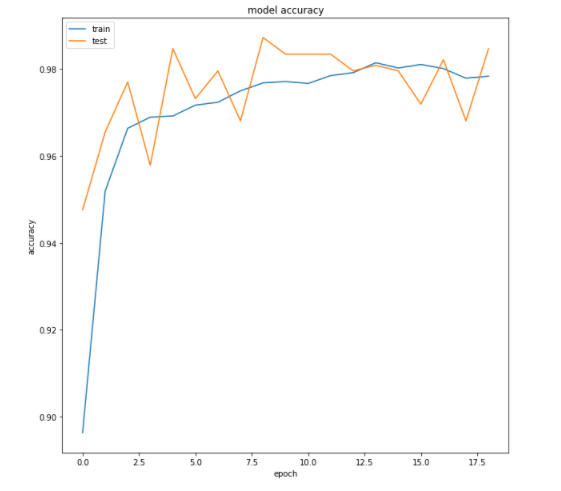
> Accuracy Curve for the model
Model testing
Finally, we look at the performance on the test data. Only the last cycle data for each engine id in the test data is kept for testing purposes.
We have to pick up labels and create test matrics in order to compute the test accuracy!
The accuracy printed while testing the model is 96.77% approx.
Compiling with deepC:
To bring the saved model on MCU, install deepC — an open-source, vendor-independent deep learning library cum compiler and inference framework, for microcomputers and micro-controllers.
Here’s the link to the complete notebook: https://cainvas.ai-tech.systems/use-cases/predictive-maintenance-using-lstm/
Credits: Umberto Griffo
Written by: Sanlap Dutta
Also Read: Checking the quality of manufactured goods — on cAInvas